自动驾驶越来越成熟,各个主机厂和Tire1的方案也不尽相同,从最近的工作中有感而发。不同的传感器在不同的场景中表现不尽相同,更全面的了解传感器能够让自驾系统的corner case更少。
一、Camera
从人类驾驶员的经验中可得人类主要依靠视觉来驾驶,因此相机是自动驾驶中不可或缺的一种传感器。从Tesla的自驾方案可见Camera的地位极高,甚至采用了纯视觉方案。Camera的发展历史较长,因此有很多种类的相机,比如可见光/红外/热成像/EVS等等。对比中仅使用常见的可见光车载相机作为参考。

二、Lidar
激光雷达可以看作是将无数个激光测距仪拼在一起,不停的测量不同方位的物体距离。可以生成一副点云地图,通过聚类/跟踪等等算法可以识别目标及目标速度,还可以预测物体的运动方向。作为一种为自动驾驶应运而生的传感器,自然有其长处。综合对比以乘用车市占率最大的禾赛/速腾为参考。
三、Radar
这里将Radar区分为3D和4D两种, 两者的主要区别宏观上3D Radar不具备高度测量能力,4D Radar可以测量目标的高度;微观上3D Radar收发通道较少,天线阵列较少;4D Radar多片级联或者集成MMIC收发通道较多,天线阵列较多。这里3D Radar以常见的TI NXP方案产品为参考;4D radar以常见的多片级联及Arbe方案为参考。

四、USS
USS算不算是自驾传感器?在自动泊车方案中算是,Urban和HighWay方案中不算是。在此也加入对比,USS传感器在我的工作中出现频次不算低,可以算是一种低成本,成熟度高,且可靠的短距测距传感器。以车载的全封闭USS传感器为参考。

五、评分说明
评分无法做到完全客观及考虑周全,不同厂商的传感器方案差异较大,只以常见(市占率最高)的为参考进行评分。
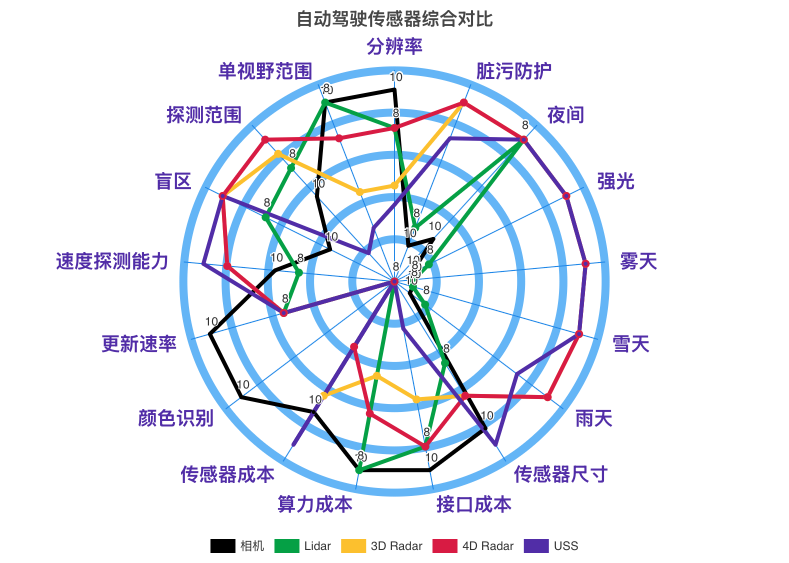
六、对比雷达图